Combining Ocean Exploration Technologies to Understand the Geologist Seamounts
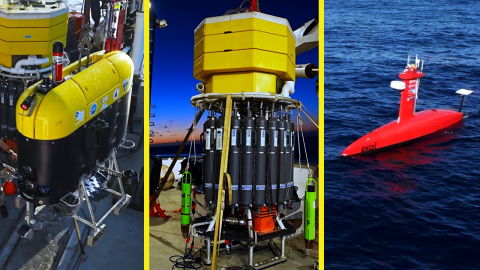
For our third iteration of the Ocean Exploration Cooperative Institute (OECI) technology collaboration, we welcome some of the best and brightest in ocean exploration onboard E/V Nautilus! OET is hosting three different autonomous and remotely operated platforms on the ship to keep bounding ahead strategies for deploying multiple underwater vehicles in tandem to advance efficiencies in ocean exploration: the University of New Hampshire’s uncrewed surface vehicle (USV) DriX, the University of Rhode Island’s Deep Autonomous Profiler (DAP) Lander, and Woods Hole Oceanographic Institution’s hybrid remotely-operated vehicle (HROV) Mesobot.
Building from multiple expeditions of team and technological collaboration aboard E/V Nautilus, this year, we focus the power of this exploration approach to better understand the Geologist seamounts and the water column above in a way no single autonomous technology could do alone. A particular focus of this expedition will be to use DriX’s EK80 sonar to understand better the midwater environment above the seamounts, which are difficult to explore and host high abundances of pelagic organisms. The team aims to use DriX’s communication tools to direct HROV Mesobot and the DAP Lander for targeted sampling in these areas.

OECI Multi-vehicle Exploration
Over the last three years OET has been working with partners from Ocean Exploration Cooperative Institute (OECI) to integrate emerging exploration technologies to enhance ocean exploration.